「安全・安心」締結ソリューションを提供します
本技術寄稿では、トルクレンチの着力点位置や力の方向の誤差と工具自体の誤差が締付け…
本技術寄稿では、トルクレンチの着力点位置や力の方…
トルク法における締付けトルクのばらつき トルク法は、簡便で…
トルク法における締付けトルクのばらつき &nb…
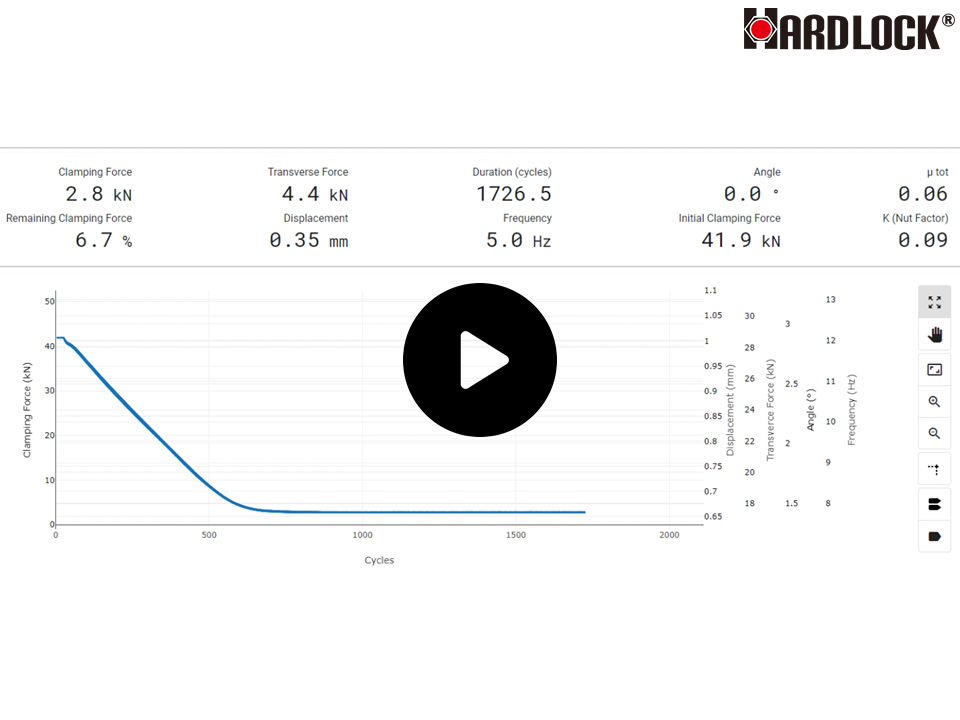
動力の伝達手段としてベルトや歯車等多くの手法が存在します。動力発生源の多くが軸の…
動力の伝達手段としてベルトや歯車等多くの手法が存…
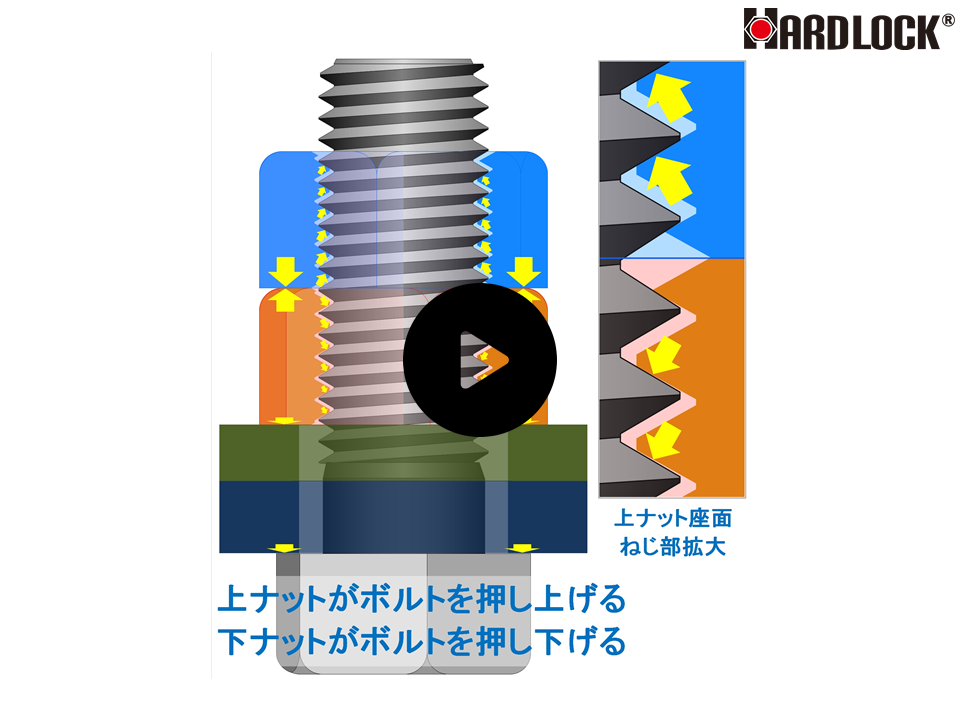
ご存じの通り、目にするほとんどのネジは右ねじ(時計の針が回る方向に回し締め込みを…
ご存じの通り、目にするほとんどのネジは右ねじ(時…
転がり軸受用ロックナット(以下、ロックナットという)は転がり軸受(ベアリング)が…
転がり軸受用ロックナット(以下、ロックナットとい…
これまでにねじ締結技術ナビにて公開したボルトの締付け方法に関する技術資料とコンテ…
これまでにねじ締結技術ナビにて公開したボルトの締…
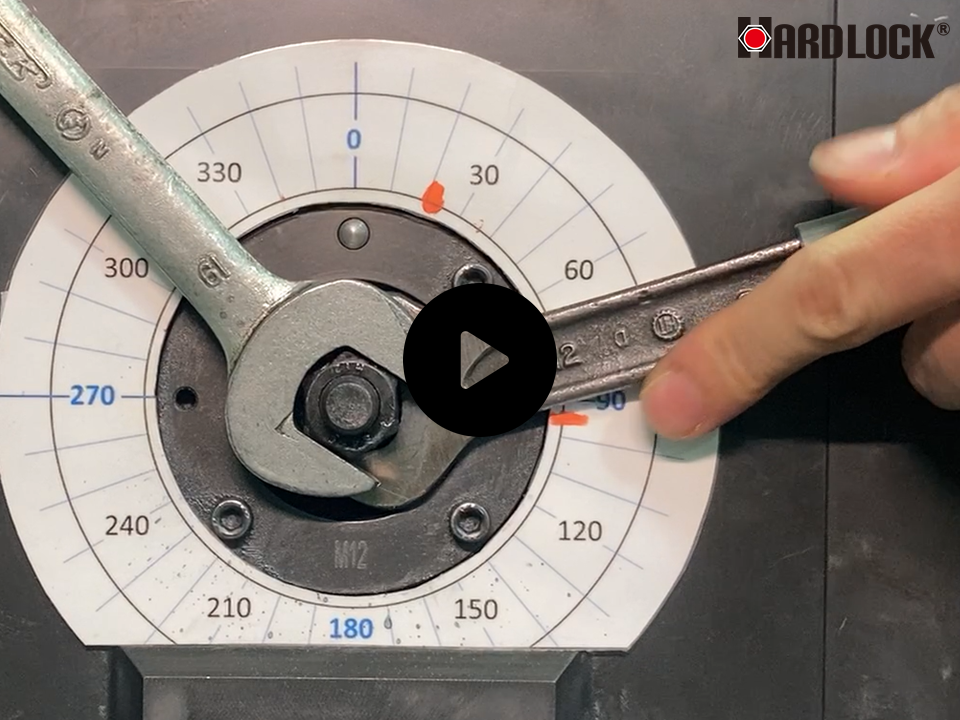
ボルトを適切に締付けることは極めて重要です。締付け方法はいくつかありますが、この…
ボルトを適切に締付けることは極めて重要です。締付…
(この技術資料のダウンロードはこちらから) bcc構造とf…
(この技術資料のダウンロードはこちらから) …
記事がありません。
本技術資料では、主に鉄鋼材料の低温疲労強度に関して(bcc構造のフェライト鋼とf…
本技術資料では、主に鉄鋼材料の低温疲労強度に関し…
一定の温度で荷重をかけて応力を加え続けると、ひずみが時間の経過とともに増加し続け…
一定の温度で荷重をかけて応力を加え続けると、ひず…
材料を高温中で一定の荷重をかけ続けると、時間の経過とともにひずみが増加していくク…
材料を高温中で一定の荷重をかけ続けると、時間の経…
外部の専門家の方に寄稿頂くシリーズ第9回目です。 寄稿者は東京都立大学システムデ…
外部の専門家の方に寄稿頂くシリーズ第9回目です。…
本技術資料では、鍛造の種類、役割、鍛造組織、鍛流線の形成について簡単に紹介した後…
本技術資料では、鍛造の種類、役割、鍛造組織、鍛流…
本技術資料では、高温(絶対温度の融点の半分程度を指します)環境下で用いられる種々…
本技術資料では、高温(絶対温度の融点の半分程度を…
外部の専門家の方に寄稿頂くシリーズ第8回目です。 寄稿者は東京都立大学システムデ…
外部の専門家の方に寄稿頂くシリーズ第8回目です。…
ねじのゆるみでお困りの方は、下のボタンをクリックしお気軽にご相談ください。
ハードロック工業の製品情報やCADデータなどは公式ホームページでご覧いただけます。





.png)
.png)
.png)
.png)
.png)
).png)
).png)
.png)




.png)
.png)
.png)
.png)
2.png)